Innovative Medizintechnik - Prototypen aus der Medizintechnikentwicklung

Beruhigungssauger
Die Behandlung von Kindern und insbesondere von Früh- und Neugeborenen im Rahmen einer Bronchoskopie erfolgt oftmals transoral, weil die eingeführten Instrumente (flexibles Endoskop) noch zu starr und zu groß für den transnasalen Zugang sein können, und damit einhergehend das Verletzungsrisiko größer wäre. weitere...
- Metallfreie und kompakte Positioniereinrichtung für z.B. MRT-Behandlungen
In verschiedenen Bereichen wie Medizin, Industrie oder Forschung werden verschiedene Technologien zur Positionierung von Objekten oder Personen eingesetzt. Dazu gehören beispielsweise Direktantriebe wie Servomototen oder mechanische Positioniersysteme mit Metallkomponenten. Diese Ansätze sind jedoch mit technischen Problemen wie einer ungenauen Positionierung, unerwünschten Vibrationen und möglichen Störungen von Magnetfeldern behaftet. Die Verwendung von Metallteilen kann bei medizinischen Anwendungen die Bildgebung durch den Magnetresonanztomographen beeinträchtigen. Andere Technologien wie magnetische Positionierungssysteme waren zwar MRT-kompatibel, aber teuer und komplex. In der industriellen Fertigung, Elektronikfertigung und Luft- und Raumfahrt wurden ebenfalls spezialisierte Positionierungseinrich-tungen verwendet, um verschiedene Aufgaben präzise zu erledigen. Jedoch erfüllten diese bestehenden Technologien nicht immer alle Anforderungen, vor allem in Bezug auf MRT-Kompatibilität, ferngesteuerte Bedienbarkeit und minimale Vibrationen.
- Kopplungsstation für Zugmittelsysteme
Um eine Verbindung von einem entfernt platzierten Antriebselement zu schaffen, werden vor allem in der Medizintechnik Zugmittelsysteme eingesetzt. Sie ermöglichen es selbst auf kleinstem Bauraum Kräfte mit einer hohen Präzision zu übertragen und Systeme mechanisch fernsteuerbar zu machen. Eine Schwierigkeit stellt hierbei jedoch die Unterbrechung der Zugmittelsysteme bspw. mit geeigneten Kupplungsmechaniken dar. Eine Trenn-barkeit vom Zugseiltrieb des Antriebselementes zum Zugseilantrieb des Abtriebselementes kann aus unterschiedlichen Gründen erforderlich sein. Die Realisierung einer Verbindung zwischen zwei Zugmitteln bzw. Seilzugantrieben, die rein mechanisch, einfach und sicher ist, stellt jedoch eine technische Herausforderung dar.
- Gebremster Schubkettenantrieb
Ein Schubkettenantrieb ist ein oftmals elektromotorisch angetriebenes mechanisches System, das aus zwei flexiblen und formschlüssig ineinandergreifenden Teilsträngen besteht. Der Formschluss wird dadurch erreicht, dass einzelne Glieder, die auf jedem flexiblen Teilstrang einzeln und regelmäßig angeordnet und fixiert sind, miteinander in Eingriff gebracht werden – analog zum Reißverschlussprinzip. Durch die Form ihrer Glieder formschlüssig miteinander verbunden, bilden die zwei Teilstränge dann im Eingriffszustand einen sogenannten „Triebstock“, der relativ fest und biegesteif ist.
Nachteile existierender Systeme: Die meisten Schubkettenantriebe erfordern Führungssysteme, um sie gegen Knicken zu schützen. Einige Schubkettenantriebe können, je nach Gestaltung und Leistungsvermögen vom z. B. Elektromotor, mit einem Spalt zwischen den Gliedern ausgeführt sein.
- Marker für die Visualisierung von Instrumenten und deren Führungsvorrichtungen

Interventionen während einer Magnetresonanz (MR)- oder Computertomographie (CT), wie z. B. bildgeführte Biopsien, Punktionen oder Ablationen, können heutzutage nur erschwert durchgeführt werden, da die Instrumente und Führungsvorrichtungen entweder nicht MR-kompatibel sind oder in der Bildgebung nicht oder nicht korrekt sichtbar sind. Daher kann, insbesondere vorab des Einstechens der Instrumente, deren Ausrichtung vom Einstichpunkt relativ zur Zielstruktur (Interventionstrajektorie) nicht exakt bestimmt werden. Um die Interventionstrajektorie dennoch einhalten zu können, werden MR-sichtbare Marker genutzt. Allerdings führen bisher eingesetzte Marker aufgrund der verwendeten Materialien oft zu ungewollten Bildartefakten oder weisen keine ausreichend fein aufgelösten Strukturen für eine mögliche Berechnung einer optimalen Trajektorie auf. Darüber hinaus ist die Herstellung von individuellen Markern aufwendig und teuer. Beispielsweise müssen Wandstrukturen im Marker manuell mit Markerflüssigkeit befüllt und anschließend abgedichtet werden oder die Marker müssen an die unterschiedlichen Interventionen angepasst werden.
- Behandlungssitzgruppe für Patient und medizinisches Fachpersonal
Im alltäglichen Klinikalltag, ist die richtige Positionierung und Lagerung von Patienten für anschließende Therapien von enormer Wichtigkeit. Speziell für perkutane Eingriffe in den Bereichen Rücken und Schulter, retroperitoneal gelegenen Organen, seitlicher Teil des Rumpfes und im Lendenwirbelbereich müssen Patienten in Bauch‐, Seiten‐, Rückenlage oder frei sitzend positioniert werden. Für eine richtige Positionierung sind verschiedenste Keile, Rollen und Halterungen notwendig, die eine optimale Lagerung des Patienten zeitaufwendig und schwierig gestalten.
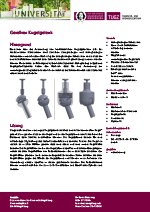
- Geteiltes Kugelgelenk
 Betrachtet man die Anwendung von herkömmlichen Kugelgelenken, z.B. bei medizinischen Haltearmen, wird zwischen zweigliedrigen und mehrgliedrigen Haltearmen unterschieden. Nachteilig bei zweigliedrigen Haltearmen ist es, dass mit einem Stellelement maximal zwei Gelenke mechanisch gleichzeitig arretiert werden können (Ausnahme: aufwändigere hydraulische Systeme). Mehrgliedrig aufgebaute Kugelgelenksysteme haben den Nachteil, dass für ihre Arretierung ein innenliegendes Zugkabel erforderlich ist, welches die Schwenkwinkel jedes Gelenkes relativ stark einschränkt.
Betrachtet man die Anwendung von herkömmlichen Kugelgelenken, z.B. bei medizinischen Haltearmen, wird zwischen zweigliedrigen und mehrgliedrigen Haltearmen unterschieden. Nachteilig bei zweigliedrigen Haltearmen ist es, dass mit einem Stellelement maximal zwei Gelenke mechanisch gleichzeitig arretiert werden können (Ausnahme: aufwändigere hydraulische Systeme). Mehrgliedrig aufgebaute Kugelgelenksysteme haben den Nachteil, dass für ihre Arretierung ein innenliegendes Zugkabel erforderlich ist, welches die Schwenkwinkel jedes Gelenkes relativ stark einschränkt.